Probing the subsurface for water content can be done using the nuclear magnetic resonance technique. With this technique the hydrogen atoms are brought to spin by applying a eternal strong magnetic field at a frequency at around 2 kHz. When the field is removed the atoms moves back to a random pattern and the magnetic field is measured during this process.
HGG has developed a lightweight wireless surface NMR system, called APSU. The system is composed of a transmitter unit (ApsuTx), a power supply (ApsuPs), a control unit (ApsuMaster) and one or several receiver units (ApsuRx).
The transmitter unit drives an untuned coil, and the unit is powered from a low-weight generator. The NMR transmit pulses are controlled by ramping the transmitter current up and down in a triangular waveform. Each half-oscillation is independently designed and the system is capable of transmitting any arbitrary NMR pulse waveform or pulse sequences, e.g. on-resonance pulse, adiabatic pulse and numerically optimized modulation (NOM) in immediate succession. The peak current at the Larmor frequency in a 50 m by 50 m transmit coil is 105 A, corresponding to 30 m depth of investigation.
The receiver units can each be connected to up to three coils and can be used to measure either NMR signals or remote reference noise. The receiver units connect wireslessly to the ApsuMaster control unit through WiFi. The system works in the central-coil configuration and has quasi-zero dead time.
All units are synchronized through GPS and several transmitters and receivers can be operated at the same time.
A magnetometer is needed to determine the Larmor frequency and for recording of fluctuations in the earth magnetic field during recording of a full NMR sounding. The NMR-sounding is followed up by a TEM sounding (WalkTEM), which provides the resistivity structure of the subsurface. The resistivity structure is used in the modeling and inversion of the NMR signals.
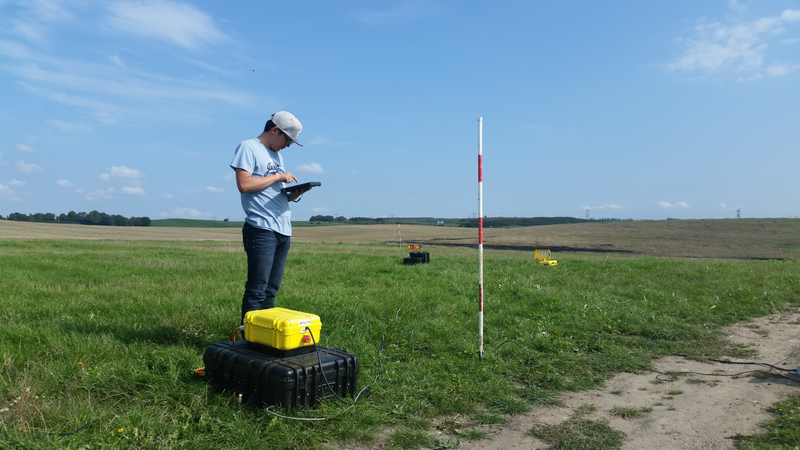
The Apsu surface NMR system